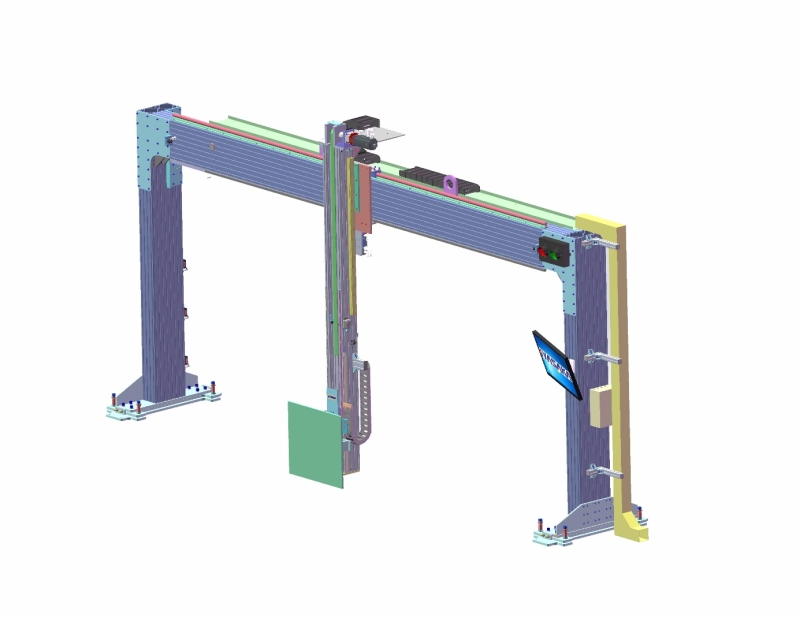
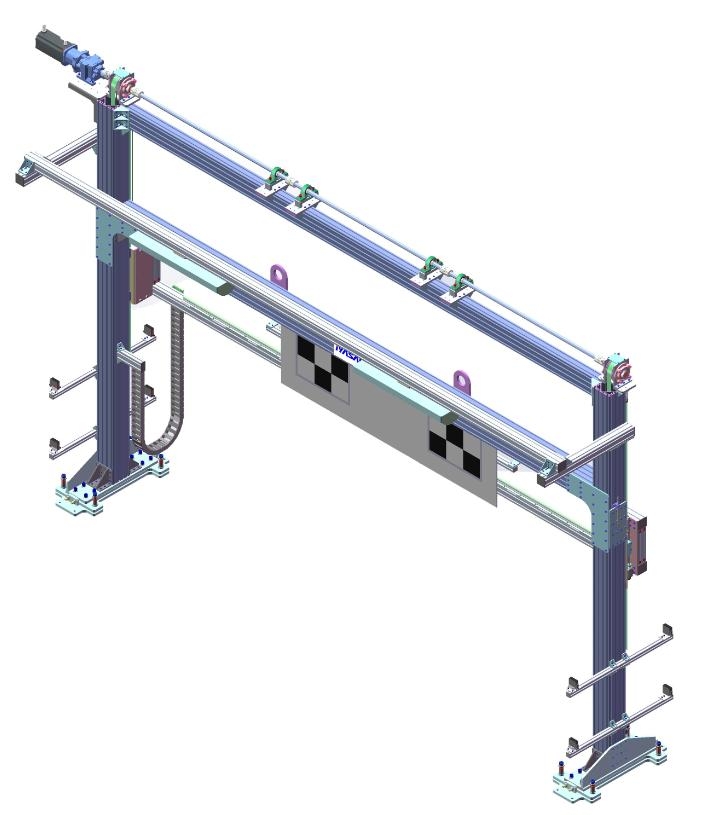
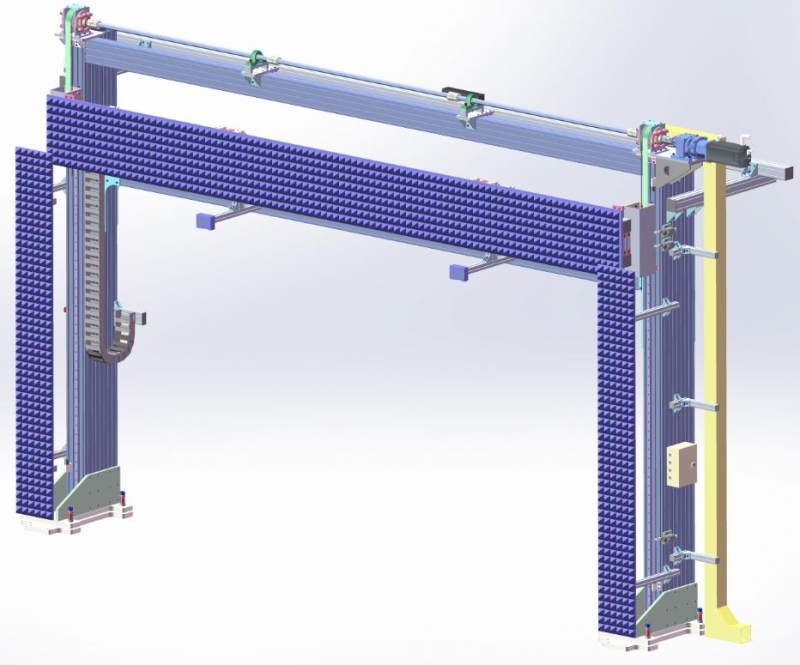
BSD Corner Radar Calibration Equipment
An aluminum alloy gantry structure is used to support the BSD reflective triangular cone. A Siemens servo motor and linear slide rail are equipped in the X-axis direction, with automatic movement realized by a synchronous servo-driven synchronous belt transmission method. A Siemens servo motor and cylindrical slide rail are equipped in the Y-axis direction, with automatic movement adopted by a servo-driven gear and rack transmission method. A Siemens servo motor and linear slide rail are equipped in the Z direction, with automatic movement achieved by a synchronous servo-driven synchronous belt transmission method, and precise positioning is realized. The X-direction movement speed is greater than 150mm/s, the Y-direction movement speed is greater than 250mm/s, and the Z-direction movement speed is not greater than 150mm/s.