Product Details
HUD Visual Structure
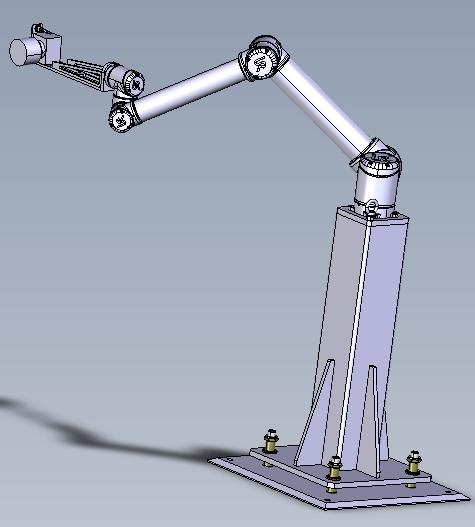
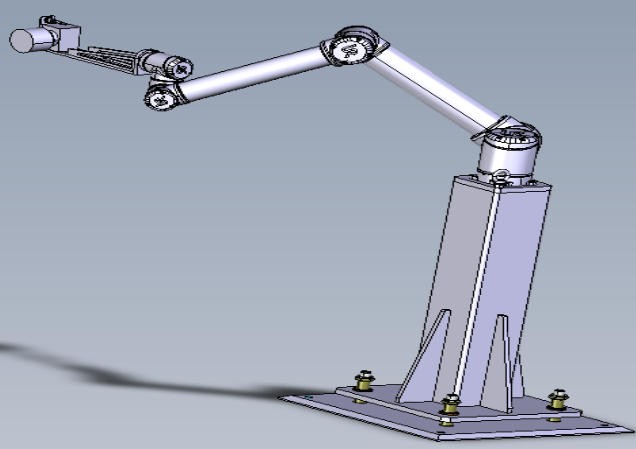
Schematic Diagram of 3D Model of Assistant Robot Device
A 6-axis collaborative robot is used to move the camera in a fully automatic manner, eliminating the need for operators to provide auxiliary movement operations. When the robot is not working, the entire robot automatically moves to a position away from the driver's seat to facilitate the driver's getting off the vehicle.
The 6-degree-of-freedom robot has a load capacity of ≥7kg, which is suitable for the installation and movement of the calibration camera, and its positioning accuracy reaches ±0.5mm.

Technical Specifications
Collaborative Robot | JAKA or Elite |
Effective Payload | ≥6kg and meeting calibration requirements |
Effective Arm Span | ≥910mm and meeting calibration requirements |
Joint Range | ±175 degrees |
Repeat Positioning Accuracy | ±0.3mm |
Degrees of Freedom | 6 rotating joints |
Movement Positioning Accuracy | ±1mm |
Camera
The camera system consists of a robot and an industrial camera with a lens. The robot rotates around the X-axis and Y-axis. Among them, the automatic rotation function around the Y-axis is used to control the downward viewing (pitch) angle of the camera, enabling the camera system to adapt to different vehicle models. The robot has an adjustment function around the X-axis, which is used to control the horizontal (roll) angle of the camera, allowing the camera system to also compensate for the inconsistency of left and right tire pressure. The camera adopts an industrial Ethernet POE camera, which is suitable for large-scale production environments in industrial sites.
Imported zoom camera with auto-focus and auto-exposure functions (suitable for all vehicle models, including WHUD and AR-HUD calibration).
Technical Parameters
Technical Parameters | Camera |
Manufacturer | AVT |
Brand | Manko G |
Sensor Type | CMOS |
Interface | GigE, POE |
Lens Interface | C-Mount |
Image Size | 1280*1024 |
Pixel Size | 5.3um*5.3um |
Lens Focal Length | Determined according to requirements |
Robot Control Accuracy |
Downward Viewing (Pitch) Angle | ±0.1° |
Horizontal (Roll) Angle | ±0.1° |
Robot Rotation Range |
Downward Viewing (Pitch) Angle | ±45° |
Horizontal (Roll) Angle | ±45° |
Background Wall
The automatic background wall is set in front of the vehicle. During calibration, the background wall automatically rises and falls to the light-shielding position to eliminate the interference of the front ambient light on the camera system.
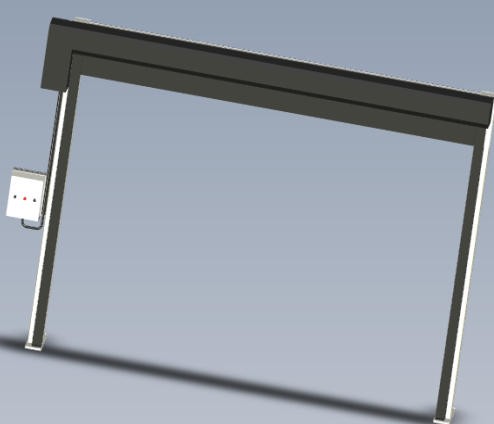
Form | Gantry Opaque Black Rapid Door |
Light-Shielding Area | - |
X-axis | ±1000 mm |
Z-axis | 0~1800 mm |
Control Method | Inverter Motor Drive |
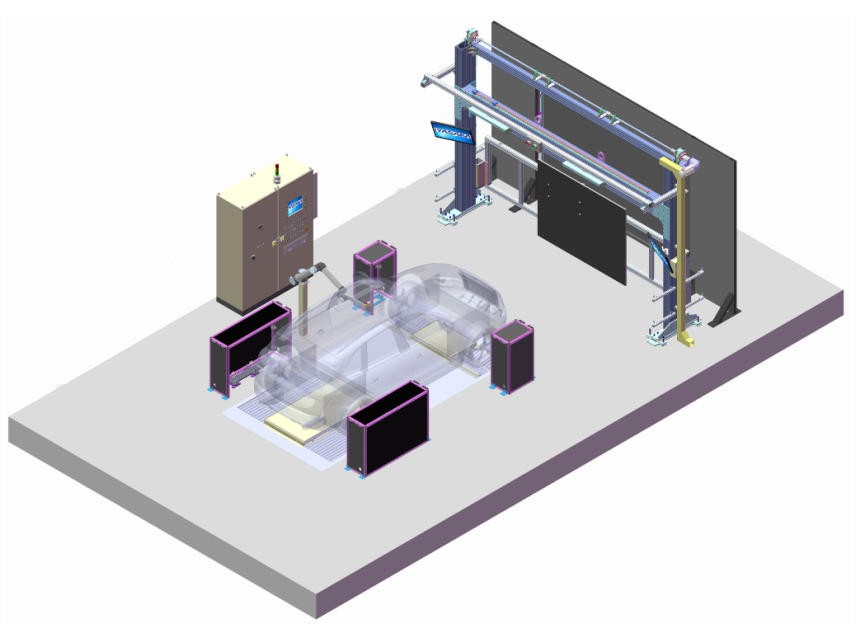
Schematic Diagram of AR-HUD Calibration Equipment Solution
Back