Product Details
Purpose
Vehicle Contour Dimension Detector is mainly used for the automatic measurement of vehicle contour dimensions (length, width, height, number of axles, wheelbase). It adopts pass-through, fully automatic dynamic measurement technology. After the vehicle drives out of the detection area, the system automatically calculates the length, width and height of the vehicle's contour dimensions.
Applicable Vehicle Types
• Stake-type ordinary trucks, stake-type trailers;
• Box-type trucks, box-type trailers;
• Enclosed trucks;
• Stake-side trucks, stake-side trailers;
• Dump trucks;
• Flatbed trucks, flatbed trailers;
• Tank trucks, tank trailers;
• Buses with a length of more than 6 meters;
Standards
• GB38900-2020 "Motor Vehicle Safety Technical Inspection Items and Methods"
• GB1589-2016 "Outer Dimensions, Axle Load and Mass Limits of Motor Vehicles, Trailers and Combination Vehicles"
• JJF04-2017 "Calibration Specification for Vehicle Contour Dimension Measuring Instruments"
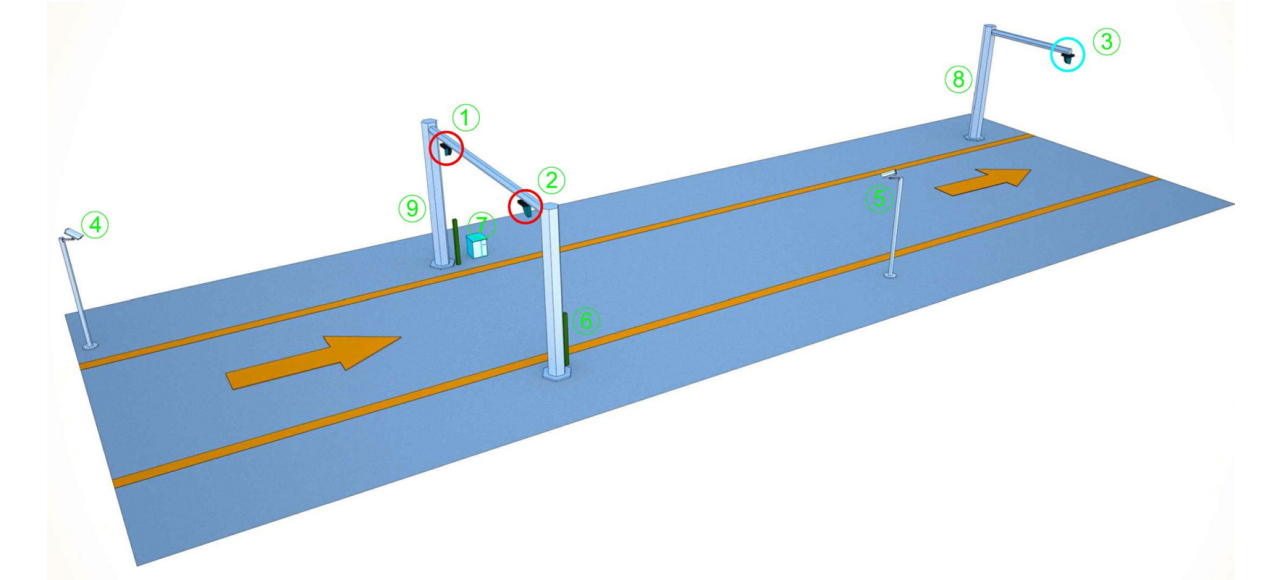
Composition and Principle
The detector is composed of a laser radar measurement unit, an electrical control cabinet, an industrial computer, a gantry frame and related accessories. The first group of two laser radars is located on both sides directly above the vehicle entry position, used to scan the vehicle's width and height; the second group of one laser radar is located directly above the center line of the vehicle exit position, used to scan the vehicle's length. When the vehicle passes by, the three radars start scanning the vehicle and transmit the scanning data through the network. When the vehicle completely passes directly below the first group of radars, the radars stop scanning to realize automatic detection of the vehicle's length, width and height.
The wheelbase measurement is to calculate the number of vehicle axles and wheelbase by combining the length-measuring radar and infrared photoelectric switch.
Technical Parameters
Parameter Name | Specific Specifications |
Length Measurement Range | 1m~30m |
Height Measurement Range | 1m~9m |
Width Measurement Range | 1m~9m (subject to lane width) |
Length Measurement Error | <±1% or ±50mm |
Width Measurement Error | <±1% or ±20mm |
Height Measurement Error | <±1% or ±20mm. |
Operating Ambient Temperature | -30℃—+60℃ |
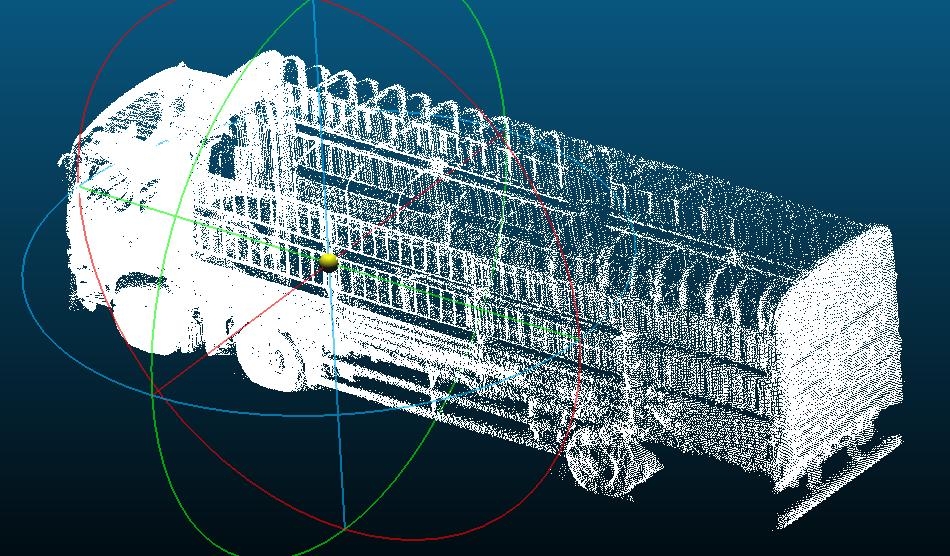
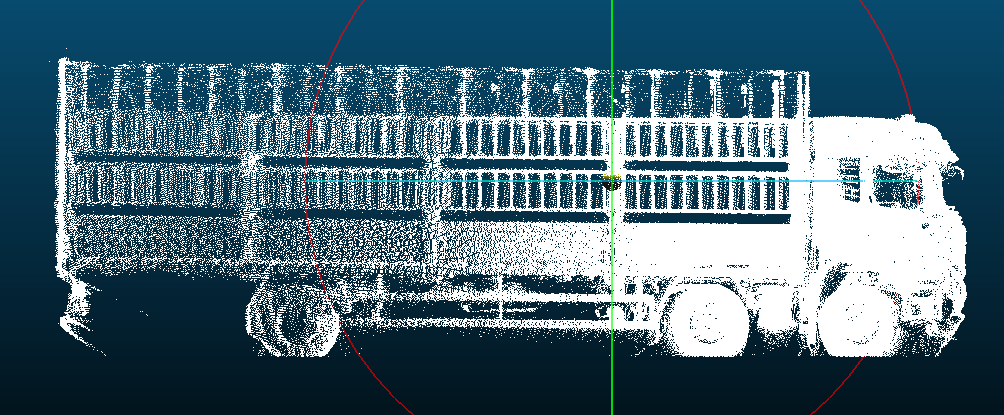
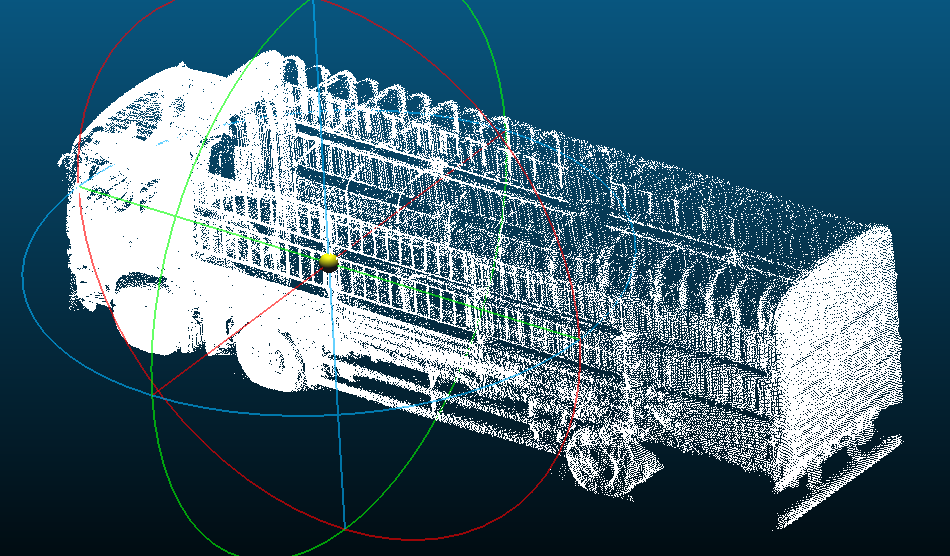
Radar Scanning Point Cloud Effect Diagram
Back